- Product Description
-
Order Data
Order Data Order No.
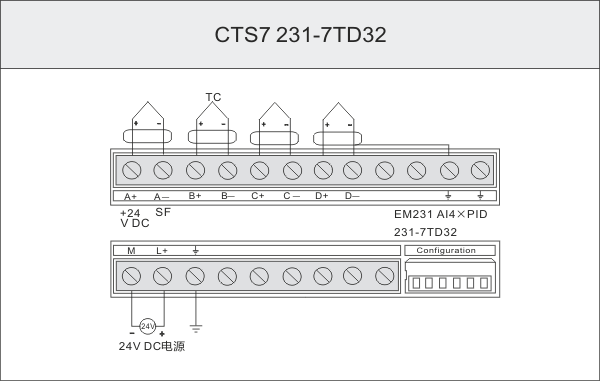
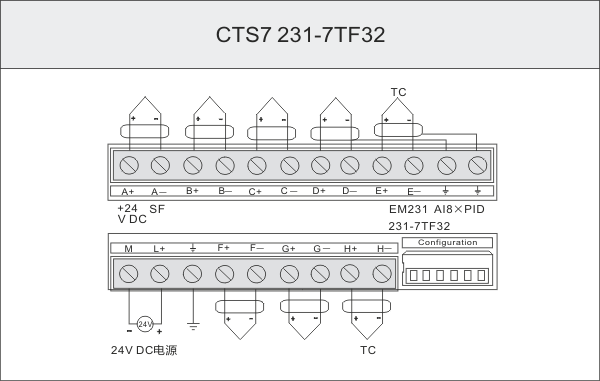
CTSC-200 EM231, 4AI×TC PID CTS7 231-7TD32 CTSC-200 EM231, 8AI×TC PID CTS7 231-7TF32
- Technical Spec
-
Performance Parameters
Specification
EM231, 4TC×PID
EM231, 8TC×PID
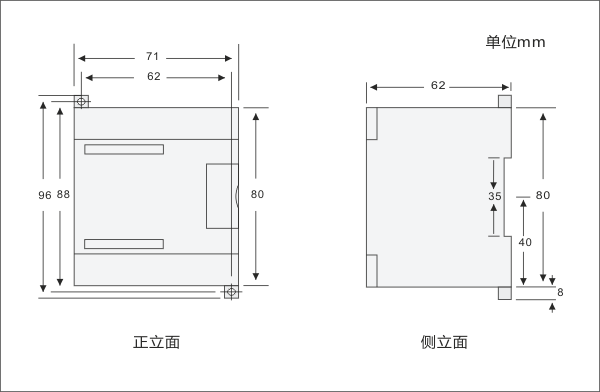
Physical Features Dimensions(W×H×D)
71.2×80×62mm
71.2×80×62mm
Power Loss(dissipation) 1.7W 1.7W Power Consumption From +5V(from I/O bus) 87mA From L+ 60 mA L+ voltage range,class 2 or DC sensor supply 20.4~28.8V DC LED indicator 24 VDC Power Supply Good: ON = no fault,OFF = no power ;
SF: ON=module fault, Blink=input signal error, OFF=normal;Analog Input Features Input type Floating Thermocouple Input range TC type: K Number of analog input points 4 points 8 points Isolation Field to Logic
Field to 24V DC
24V DC to logic500V AC
500V AC
500V ACCommon mode input range
(input channel to input channel)120V AC Common mode rejection >120dB@120V AC Input resolution TemperatureVoltage0.1℃/0.1℉
15 bits plus signMeasuring principle Sigma-Delta Module update time for all channel 425ms 825ms Wire length to sensor, maximum 100 m Wire loop resistance 100Ω Suppression of interference 85dB@ 50Hz/60Hz/400Hz Data word format Voltage: -27648 to +27648 Input impedance ≥1MΩ Maximum input voltage 30V DC Input filter attenuation -3dB@ 21kHz Basic error 0.1% FS(Voltage) Repeatability 0.05% FS Cold junction error ±1.5℃ 24V DC supply voltage range 20.4 to 28.8 VDC Diagnostic program LED:EXTF,SF PID Features PID arithmetic PID+FUZZY argument auto-tuning Sampling time 1 second Minimum output pulse time 10 ms PID type P、PI、PD、PID PID output type Analog or PWMPID output polarity Bipolar or unipolarConfiguring PID Address
Calculating the PID address
PID address Formula Note Address for PID argument A=(2048+S*256)+16*C S is the installing slot no.of the module (0~6)C is the point no.( 0~7 for 8PID module and 0~3 for 4PID moduleAddress for PID positive pulse X=(2048+S*256)+12 Address for PID negative pulse Y=(2048+S*256)+13 PID argument output (Module to CPU)
Description Address Setting Value Actual Value Actual temperature VM A -2000~13000 -200~1300℃Status word VM A+2 data readPID analog output VM A+4 -32000~32000 -32000~32000PID argument input (CPU to module)
Description Address Setting Value Actual Value Setting temperature VM A+128 -2000~13000 -200~1300℃ Control bytes When VB A+130 is zero When VB A+130 is 1 V( A+130).0 PID disable, no output PID enable V( A+130).1 Integral is always active and Kp is not auto tuning Integral is not active and Kp is auto tuning V( A+130).2 Unipolar PID output, 0~32000 Bipolar PID output, 32000~32000, with calefaction and cooling function V( A+130).3 UnusedV( A+130).4 Integral is active Integral is not active V( A+130).5 Differential is active Differential is not active V( A+130).6 Filteing for input Not Filtering for input Pulse output cycle for PID VW A+132 1~2551~255 secondsKp VW A+134 0~99990~999.9Ti (Integral time) VW A+136 0~3600 0~3600 seconds Td (differential time) VW A+138 0~3600 0~3600 seconds Address for positive pulse output
point 0 V X.0point 1 V X.1 point 2 V X.2 point 3 V X.3 point 4 V X.4 point 5 V X.5 point 6 V X.6 point 7 V X.7 Address for negative pulse output
point 0 V Y.0point 1 V Y.1 point 2 V Y.2 point 3 V Y.3 point 4 V Y.4 point 5 V Y.5 point 6 V Y.6 point 7 V Y.7 Example
The EM231 8AI×PID module is installed at the second slot, now to configure its last PID loop( with Kp=120,Ti=360,Td=50, and the pulse output cycle = 2s)Firstly calculating the PID address:S=1,C=7A = 2048 + 1 * 256 + 16 * 7 = 2416X = 2048 + 1 * 256 + 12 = 2316Y = 2048 + 1 * 256 + 13 = 2317Then setting or reading the argument data refer to the following note:VW2544 //setting emperature, actual value=setting data / 10VB2546 //control byte (PID enable、auto-tuning、bipolar output)
VW2548 //setting pulse output cycle
VW2550 //Setting Kp
VW2552 //Setting Ti
VW2554 //Setting Td
VW2416 //The actual temperature
VW2418 //The status word
VW2420 //The PID analog outputThe module of PID parameter takes the CPU's V memory area.For PID module to work correctly, please don't use the V memory area taken by PID modules in other functions.Module at slot 0 takes address: VW2048 to VW2298
Module at slot 1 takes address: VW2304 to VW2554
Module at slot 2 takes address:VW2560 to VW2810
Module at slot 3 takes address:VW2816 to VW3066
Module at slot 4 takes address:VW3072 to VW3322
Module at slot 5 takes address:VW3328 to VW3578
Module at slot 6 takes address:VW3584 to VW3834You can call the PIDSetting subroutine in EM231 PID library to configure the PID parameters.thermocouple type SW3 0: Type J
1: Type KBurnout direction SW4 0: Upscale (+3276.7degrees)
1: Downscale (-3276.8degrees)Temperature scale SW5 0:Celsius (℃), 1:Fahrenheit (℉) cold junction compensation SW6 0: enable 1:disable
- Installation
-
Size Diagram
Wiring Diagram